Integrated Drive and XY Motion Controller
Integrated
Drive and XY Motion Controller
Flexible Low Voltage Motor Drive:
One Board - Multiple Configurations
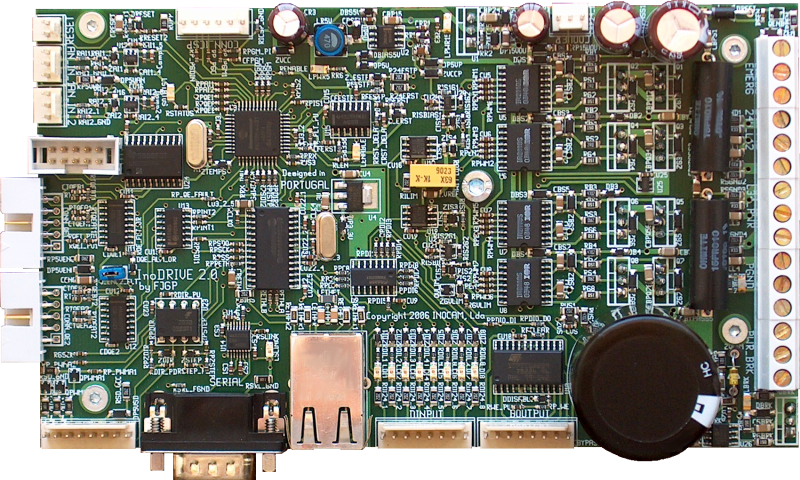
InoDRIVE represents a new concept in low cost servo drives: powered by a flexible power stage and a new generation flash micro-controller, it enables the control of different motor types just by simply flashing different firmware programs using a PC serial port.
InoCAM supplies 4 firmware programs with each drive, to control 2 Brush DC servo motors, a single brushless motor (trapezoidal DC commutation or AC SVM) or one open-loop bipolar stepper motor, with other versions planned for the future.
Furthermore, many high volume low cost applications that don't require a computer, can be implemented directly on the onboard micro-controller just by developing special purpose firmware programs, highly reducing costs and simplifying maintenance.
With digital IO, analog inputs, emergency circuit and the capability to drive two DC brush motors, InoDRIVE integrates all the electronics necessary to implement a XY plotter or other positioning systems on a single board, greatly simplifying both construction and maintenance procedures. More complex systems can be easily implemented by networking multiple InoDRIVE boards using Ethernet.
The compressed serial command protocol enables the execution of up to 1220 motion commands per second and the internal motion queue continuously stores 255 commands in advance (200 ms), permitting the use of regular multi-tasking operating systems.
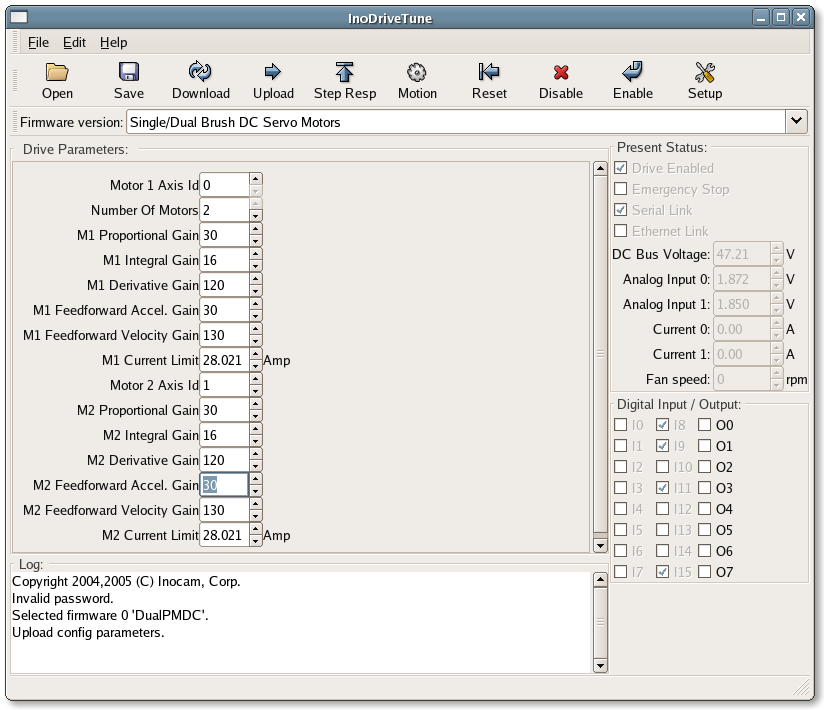
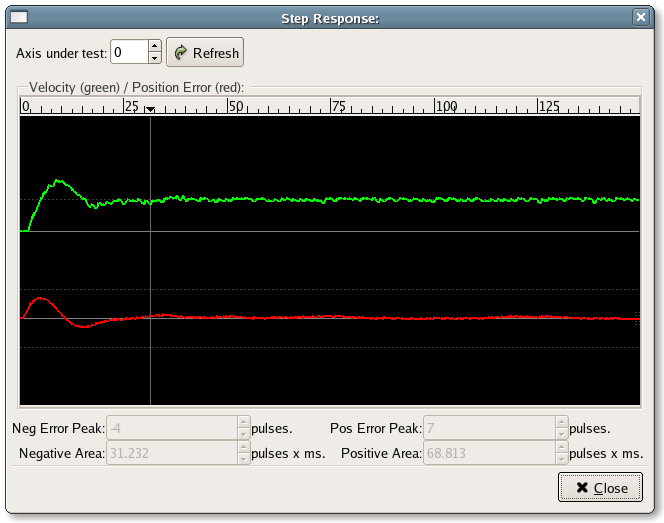
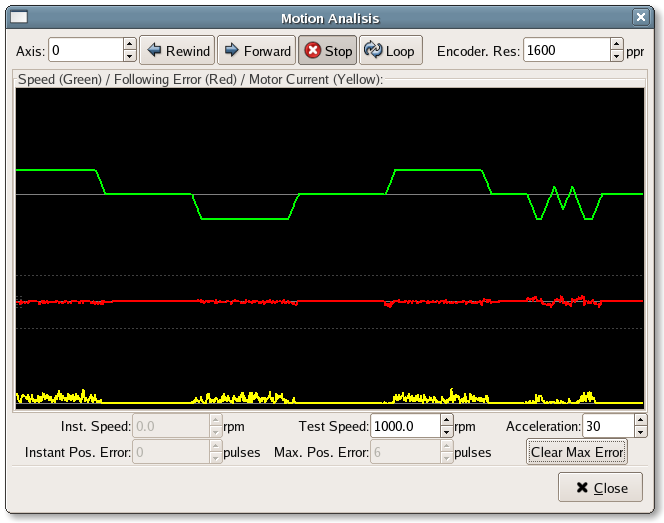
To tune control parameters, InoCAM provides a user-friendly application to configure drive parameters, monitor step and trapezoidal responses, flash new firmware programs and monitor errors and IO signals.
To simplify the development of high level motion control applications, InoCAM offers a library with a programming API, supporting all IO functions, low level motion commands and simple positioning moves.
|
|
|
|
Specifications:
|
Logic Supply: |
24V nominal (18V to 36V) DC |
|
Power Supply: |
18V to 74V DC (90V Abs. Maximum) |
|
Current Limit: |
20A cont. 40A peak (software configurable) |
|
PWM Frequency: |
39KHz |
|
Servo loop: |
10KHz Position PID with Velocity and Acceleration Feedforward |
|
Servo Lock Range: |
+/- 128 Encoder pulses |
|
Analog Speed reference: |
Speed Gain and Offset Settings |
|
Microstepping: |
Up to 512 microsteps per step. |
|
Motor Phase Inductance: |
L > 200uH |
|
Motor Phase Resistance: |
R >= Ke * Max Speed / 60 |
|
Protection: |
Overcurrent,
Overvoltage, Undervoltage, Overtemperature (75ºC) and |
|
Regenerative Shunt Regulator: |
External resistor - Overvoltage threshold configurable using a zener diode. |
|
Emergency Circuit: |
Latched
EStop/Reset, configurable as 5V CMOS or 24V Inputs (40V limit) |
|
8 Digital Inputs: |
Configurable as 5V CMOS or 24V (40V limit). |
|
8 Shared Digital Inputs: |
5V Shared Inputs (Encoder 1 - A/B/I, Encoder 2 - A/B, Step/Dir, Fan Tach Input) |
|
8 Digital Outputs: |
Open Drain up to 48V, 300mA continuous, 1A peak, with individual overcurrent, overtemperature and inductive clamp protection (ready to drive relays or pneumatic valves) |
|
2 Analog Inputs: |
-10V - +10V used as speed reference or general purpose analog IO. |
|
2 Encoder Interfaces: |
Single
ended TTL - Quadrature A/B – Index Optional – 4X Multiplier |
|
2 Encoder outputs: |
2x Quadrature A/B – RS422/RS485 Differential outputs |
|
Step/Direction Interface: |
5V Opto-Isolated |
|
Cooler Fan Interface: |
14V DC 150mA w/ speed sensor input |
|
Serial Interface: |
RS232, 115200 / 230400 baud, 8 bits, 1 stop bit, no parity |
|
Ethernet Interface: |
10 MBits RJ45 half or full duplex (isolated) |
|
Communication protocol: |
Serial or Ethernet, up to 1220 motion commands per second, with checksum error correction |
|
Motion command buffer: |
255 commands (200 ms) running queue |
|
Flash Programming: |
RS232 Interface or Parallel Port I2C |
|
Physical Dimensions: |
Board 5.5 x 4.0 in – Back plane: 6.0x4.0 in |